







А. А. БИРЮКОВ, Д. Н. САВИН, В. К. ЯРОВОЙ
Кафедра лечебной физической культуры, массажа и реабилитации Российского государственного университета физической культуры, спорта и туризма
«При нерациональной рабочей позе даже так называемая легкая работа, выполняемая мелкими мышцами кисти, может потребовать неадекватно больших общих затрат энергии», утверждал
 основатель отечественной школы биомеханики Николай Александрович Бернштейн. Практика показывает, что эти слова в самой полной мере относятся к профессиональной деятельности массажиста, так как ее нерациональная организация негативно сказывается на качестве труда и работоспособности специалиста. Выполнение русского массажа в течение целого рабочего дня или смены (при работе со спортсменами она может достигать 12-15 часов), утомительного даже для опытных специалистов, тяжелый физический труд, организация которого требует полноценного и всестороннего научного обоснования. Как показали наши исследования, одна из актуальных задач современного этапа развития отечественной системы массажа - разработка методики определения наилучшей высоты массажного стола (ВМС). В результате анализа учебников и руководств по классическому массажу выявлено, что одновременно существует целый спектр диаметрально противоположных мнений об оптимальной ВМС.
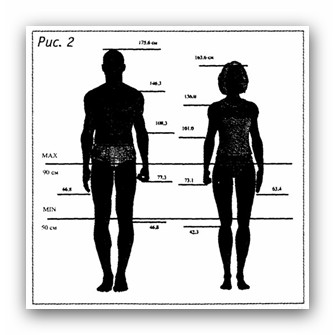
основатель отечественной школы биомеханики Николай Александрович Бернштейн. Практика показывает, что эти слова в самой полной мере относятся к профессиональной деятельности массажиста, так как ее нерациональная организация негативно сказывается на качестве труда и работоспособности специалиста. Выполнение русского массажа в течение целого рабочего дня или смены (при работе со спортсменами она может достигать 12-15 часов), утомительного даже для опытных специалистов, тяжелый физический труд, организация которого требует полноценного и всестороннего научного обоснования. Как показали наши исследования, одна из актуальных задач современного этапа развития отечественной системы массажа - разработка методики определения наилучшей высоты массажного стола (ВМС). В результате анализа учебников и руководств по классическому массажу выявлено, что одновременно существует целый спектр диаметрально противоположных мнений об оптимальной ВМС.Рекомендуемая авторами высота имеет довольно широкие пределы: от 50 (или на уровне коленных суставов) до 90 см . В большинстве источников указывается только некоторый диапазон возможной высоты (50-70 или 70-90 см) без какого-либо дополнительного пояснения. Крайне редко приводятся методики регулировки ВМС с учетом роста и длины рук массажиста, однако и в этих случаях рекомендации не всегда безукоризненны с точки зрения эргономики (рис. 1). 40 см по отношению к антропометрическим размерам тела человека (Строкина А. Н., Пахомова В. А., 1999) - величина, предполагающая совершенно разные по конструкции рабочие позы (рис. 2), а некоторые из них даже по формальным признакам (Горшков С. И., 1979; Стрелков Ю. К., 2003) можно отнести к категории вынужденных и неудобных.
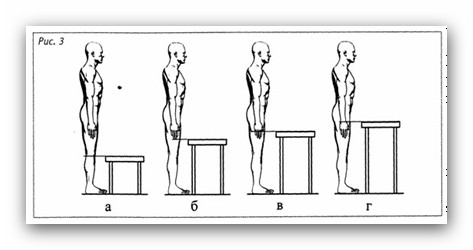
В процессе исследований, проводившихся на базе Российского государственного университета физической культуры, спорта и туризма (Москва) и Таврического национального университета (Севастополь), изучено 4 варианта рабочей позы (РП) стоя, которые моделировались за счет регулировки ВМС в соответствии с индивидуальными антропометрическими данными каждого испытуемого: • РП-1 - ВМС на уровне коленных суставов (рис. 3-а) • РП-2 - ВМС на уровне пальцевой точки (рис. З-б) • РП-3 - ВМС на уровне фаланго-вой точки (рис. 3-в) • РП-4 - ВМС на уровне шиловидного отростка лучевой кости (рис. 3-г)
Был равномерно охвачен весь спектр рекомендаций о ВМС. В качестве стандартной рабочей нагрузки испытуемые выполняли 45-минутный сеанс общего гигиенического массажа по методике А. А. Бирюкова (2006). С помощью многофункционального микропроцессорного электрофизиологического комплекса «1-330-С2+» («Еngineering», США) регистрировали частоту сокращений сердца (ЧСС), глубину и частоту дыхания, биоэлектрическую активность мышц, непосредственно задействованных в удержании РП (крестцово-остистой, большой ягодичной, двуглавой бедра, икроножной, трапециевидной, дельтовидной, двуглавой плеча). Одновременно проводились фотогониометрические измерения и анкетный опрос испытуемых.
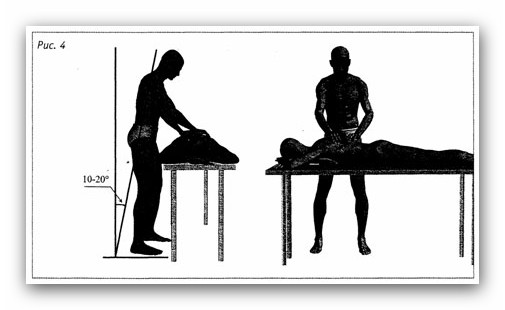 Результаты исследования убедительно доказали, что с точки зрения физиологии, биомеханики и эргономики наиболее рациональны варианты для выполнения русского массажа в РП-2 и РП-3, наклон туловища в которых не превышал 15-20° (рис. 4).
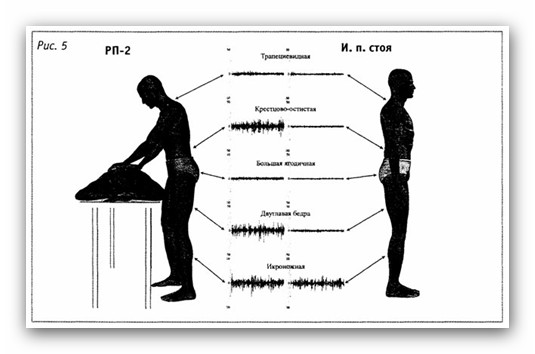
Результаты исследования убедительно доказали, что с точки зрения физиологии, биомеханики и эргономики наиболее рациональны варианты для выполнения русского массажа в РП-2 и РП-3, наклон туловища в которых не превышал 15-20° (рис. 4).Сравнительный анализ выявил, что биоэлектрическая активность мышц в РП-2 и РП-3 имела наименьшие отличия от данных, зарегистрированных в спокойном удобном положении стоя (рис. 5).
Принципиально важно, что в течение всего 45-минутного сеанса амплитуда и частотный спектр электромиографических сигналов достоверно не изменялись, что свидетельствовало (Мойкин Ю. В. и др., 1987; Роженцов В. В., Полевщиков М. М., 2006) об отсутствии даже первичных признаков нервно-мышечного утомления, то есть об относительно невысокой нагрузке на скелетные мышцы, фиксирующие данные позы.
В РП-2 и РП-3 рабочая гипервентиляция осуществлялась преимущественно за счет увеличения глубины дыхания на 210 ± 24% (по сравнению с покоем) и незначительного повышения частоты
 дыхания на 2-4 цикла/мин, то есть по наиболее выгодному варианту мобилизации резервов внешнего дыхания при циклической физической работе (рис. 6).
дыхания на 2-4 цикла/мин, то есть по наиболее выгодному варианту мобилизации резервов внешнего дыхания при циклической физической работе (рис. 6).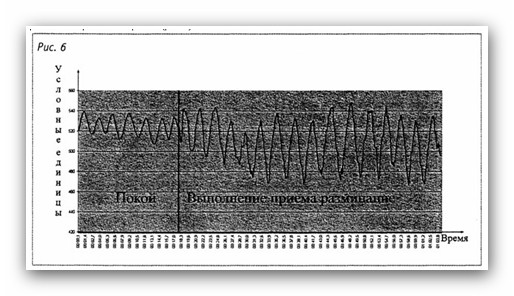
Дыхание было ритмичным. Совместный анализ пневмо- и электромиограмм показал, что в этих РП дыхательный акт органично вписан в ткань выполняемых руками движений, составляя с ней единый ансамбль – динамический стереотип.
С началом массирования ЧСС увеличивалась по сравнению с дорабочим состоянием (68 ± 6 уд/мин) на 70,5% (до 116 ± 11 уд/мин) и находилась в этих пределах вплоть до конца сеанса.
По данным анкетного опроса, РП-2 и РП-3 характеризовались испытуемыми не только как соматически (телесно) комфортные, но и как наиболее удобные для выполнения приемов массажа. Фотогониометрические измерения показали, что отмеченное массажистами субъективное удобство выполнения приемов имеет под собой вполне определенный биомеханический фундамент. Во-первых, в данных РП создавалось биомеханически выгодное пространственное расположение относительно друг друга туловища специалиста, звеньев его рук и массируемого участка. Плечо -
 предплечье - кисть массажиста - массируемый участок располагались по убывающей вниз. В среднем угол сгибания в
предплечье - кисть массажиста - массируемый участок располагались по убывающей вниз. В среднем угол сгибания в 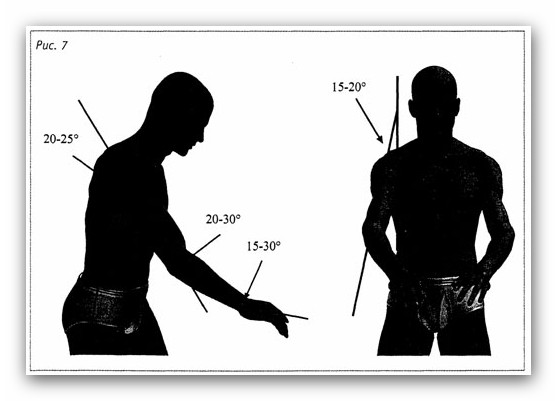 плечевом суставе составлял 20-25°, угол отведения плеча от туловища не превышал 15-20°, угол сгибания в локте - 20-30°, а угол разгибания в лу-чезапястном суставе - 15-30° (рис. 7).
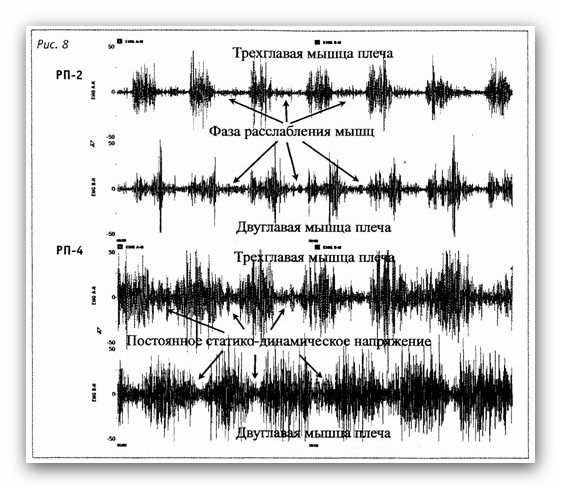
плечевом суставе составлял 20-25°, угол отведения плеча от туловища не превышал 15-20°, угол сгибания в локте - 20-30°, а угол разгибания в лу-чезапястном суставе - 15-30° (рис. 7).Как показали результаты электромиографии, такое взаимное положение требовало оптимальных затрат мышечной энергии для удержания рук в рабочем положении и давало возможность полноценно расслаблять мышцы, не участвующие в выполнении всего приема или его отдельных фаз (рис. 8).
Работающие мышцы имели микропаузы отдыха, что существенно отдаляло наступление их локального утомления. В норме сгибание пальцев сопровождается одновременным разгибанием в лучезапястном суставе в пределах 20-30° (рис. 9).
Такая синкинезия глубоко зафиксирована в центральной нервной системе человека и биологически целесообразна, поскольку направляет плоскость ладони против объекта, который предстоит захватить. Сила кистевых захватов достигает максимальных значений, когда угол разгибания в лучезапястном суставе составляет 30-40°. Если же кисть находится в нейтральном положении или, что значительно хуже, в положении сгибания, существенно ухудшается подвижность пальцев в межфаланговых суставах, а также уменьшаются
 эффективная площадь и сила большинства видов захватов (Аруин А. С, Зациорский В. М., 1989; Матеев И. Б., Банков С. Д., 1981). Именно на этой биомеханической закономерности основано большинство приемов обезоруживания противника в различных видах единоборств (Кадочников А. А., 2005).
эффективная площадь и сила большинства видов захватов (Аруин А. С, Зациорский В. М., 1989; Матеев И. Б., Банков С. Д., 1981). Именно на этой биомеханической закономерности основано большинство приемов обезоруживания противника в различных видах единоборств (Кадочников А. А., 2005).Кроме того, как показали исследования А. С. Аруина и В. М. Зациорского (1989), Г. Н. Мазунина и др. (1967), Ю. В.
 Мойкина и др. (1987), при длительной работе со сверхнормативным сгибанием или разгибанием кисти резко увеличивается риск развития профессионально обусловленных патологических процессов в различных анатомических структурах кисти ипредплечья: мягких тканях, суставных поверхностях, связках и сухожилиях.
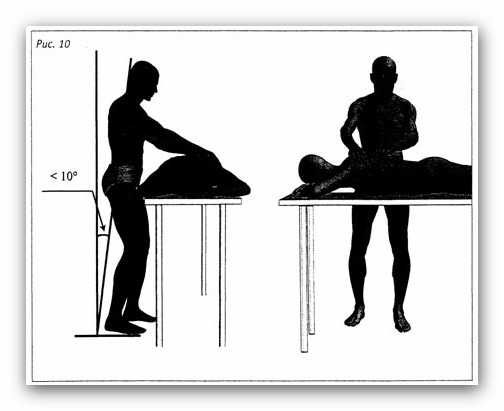
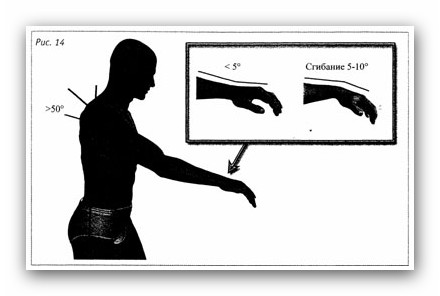
Мойкина и др. (1987), при длительной работе со сверхнормативным сгибанием или разгибанием кисти резко увеличивается риск развития профессионально обусловленных патологических процессов в различных анатомических структурах кисти ипредплечья: мягких тканях, суставных поверхностях, связках и сухожилиях.По данным фотогониометрических измерений при выполнении в РП-2 и РП-3 ординарного, двойного ординарного, двойного кольцевого разминания, двойного грифа (технически наиболее сложных видов приемов, занимающих от 60 до 80% общего времени сеанса) разгибание в лучезапястном суставе в среднем составляло 15-30°, то есть было наиболее биомеханически выгодным, что во многом и предопределило субъективное удобство и хорошую технику выполнения большинства приемов. При моделировании РП-4 положение туловища испытуемых было практически вертикальным (наклон менее 10°), однако руки постоянно находились в вынужденно приподнятом положении (рис. 10.) Угол сгибания в плечевом суставе превышал 50°, а угол отведения плеча от туловища - 25-30°, что по сравнению с РП-2 и РП-3 не только увеличило амплитуду биоэлектрической
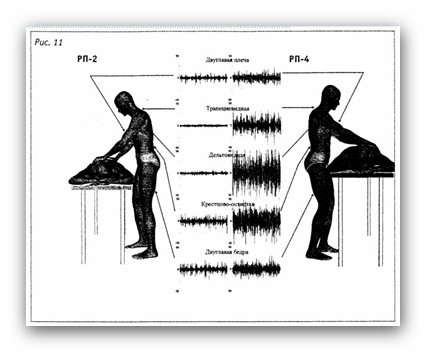 активности трапециевидной мышцы более чем в 5 раз, дельтовидной - в 4-6 раз и двуглавой плеча - в 2 раза, но и повысило активность крестцово-остистой мышцы - на 82 ± 12% и двуглавой бедра - на 90 ± 8% (рис. 11).Удержание рук в приподнятом положении ограничивало экскурсию грудной клетки, затрудняя деятельность аппарата внешнего дыхания массажиста. Глубина была на 42% меньше, а частота - на 26% выше, чем аналогичные показатели в РП-2 и РП-3, то есть дыхание было поверхностным и учащенным.
активности трапециевидной мышцы более чем в 5 раз, дельтовидной - в 4-6 раз и двуглавой плеча - в 2 раза, но и повысило активность крестцово-остистой мышцы - на 82 ± 12% и двуглавой бедра - на 90 ± 8% (рис. 11).Удержание рук в приподнятом положении ограничивало экскурсию грудной клетки, затрудняя деятельность аппарата внешнего дыхания массажиста. Глубина была на 42% меньше, а частота - на 26% выше, чем аналогичные показатели в РП-2 и РП-3, то есть дыхание было поверхностным и учащенным. 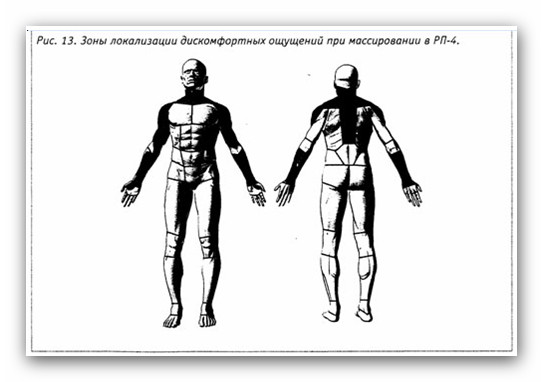 Этот факт также имеет вполне конкретное физиолого-биомеханическое объяснение. Газообмен в организме осуществляется благодаря ритмичным дыхательным движениям путем смены вдоха (инспирация) и выдоха (экспирация). В покое и при нетяжелой работе дыхательные движения обеспечиваются собственно дыхательными мышцами. В этом случае наибольшая активность отмечается на вдохе в диафрагме и межреберных мышцах, а выдох выполняется в большей мере пассивно за счет эластических сил, возникающих при расправлении грудной клетки и легких на вдохе. При значительной физической нагрузке в работу вступают вспомогательные дыхательные мышцы: на вдохе - трапециевидные и ромбовидные, большие и малые грудные, грудино-ключично-сосцевидные, разгибатели спины и некоторые другие, а на выдохе - мышцы брюшного пресса. При этом нужно учитывать, что в РП-4 большинство из перечисленных мышц развивало значительную статическую активность для удержания рук в приподнятом положении, а некоторые - еще и динамическую работу при выполнении приемов. Таким образом, двойная и даже тройная нагрузка на указанные мышцы становилась весьма существенным фактором, ограничивающим вентиляцию легких. Повышенная мышечная активность и функциональное напряжение аппарата внешнего дыхания закономерно отразились и на деятельности сердечно-сосудистой системы. В РП-4 ЧСС была на 35,3% выше, чем в РП-2 и РП-3, что в абсолютном значении составляло 140 + 11 уд/мин. Испытуемыми РП-4 (рис. 13) субъективно оценивалась как утомительная и неудобная для выполнения большинства приемов, в первую очередь различных видов разминания, что также самым непосредственным образом было связано с рассмотренными выше биомеханическими закономерностями.
Этот факт также имеет вполне конкретное физиолого-биомеханическое объяснение. Газообмен в организме осуществляется благодаря ритмичным дыхательным движениям путем смены вдоха (инспирация) и выдоха (экспирация). В покое и при нетяжелой работе дыхательные движения обеспечиваются собственно дыхательными мышцами. В этом случае наибольшая активность отмечается на вдохе в диафрагме и межреберных мышцах, а выдох выполняется в большей мере пассивно за счет эластических сил, возникающих при расправлении грудной клетки и легких на вдохе. При значительной физической нагрузке в работу вступают вспомогательные дыхательные мышцы: на вдохе - трапециевидные и ромбовидные, большие и малые грудные, грудино-ключично-сосцевидные, разгибатели спины и некоторые другие, а на выдохе - мышцы брюшного пресса. При этом нужно учитывать, что в РП-4 большинство из перечисленных мышц развивало значительную статическую активность для удержания рук в приподнятом положении, а некоторые - еще и динамическую работу при выполнении приемов. Таким образом, двойная и даже тройная нагрузка на указанные мышцы становилась весьма существенным фактором, ограничивающим вентиляцию легких. Повышенная мышечная активность и функциональное напряжение аппарата внешнего дыхания закономерно отразились и на деятельности сердечно-сосудистой системы. В РП-4 ЧСС была на 35,3% выше, чем в РП-2 и РП-3, что в абсолютном значении составляло 140 + 11 уд/мин. Испытуемыми РП-4 (рис. 13) субъективно оценивалась как утомительная и неудобная для выполнения большинства приемов, в первую очередь различных видов разминания, что также самым непосредственным образом было связано с рассмотренными выше биомеханическими закономерностями. Во-первых, удержание рук в постоянно приподнятом положении не давало возможности их крупным мышцам - двуглавой и трехглавой плеча полноценно расслабляться в микропаузах, что довольно контрастно видно при сравнении электромиограмм, зарегистрированных в РП-2 и РП-4 (см. рис. 8). Во-вторых, фотогониометрические измерения выявили, что при выполнении различных видов разминания в РП-4 кисть по отношению к предплечью находилась в нейтральном или даже слегка согнутом на 5-10° положении (рис. 14), что ухудшало подвижность сочленений пальцев и силовые
 показатели дистальных мышц.
показатели дистальных мышц.Наиболее нерациональной из всех моделировавшихся РП была РП-1, наклон туловища в которой достигал 30-45°(рис. 15), что в2-3 раза превышало эргономическую норму (15°), предельно допустимую ГОСТом 2.2.033-78 «Рабочее место при выполнении работ стоя». Осознанное правильное понимание массажистами ее сути - принципиально важное условие для рационального
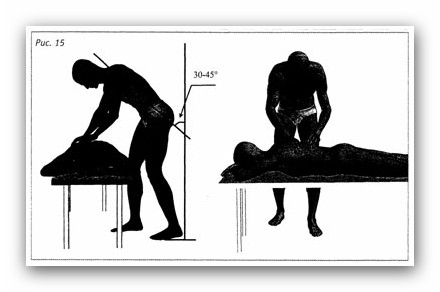 моделирования РП. Рассмотрим это более подробно. При относительно небольших наклонах туловища и головы значительная часть нагрузки на межпозвонковые диски и суставы компенсируется за счет увеличения активности мышц спины (главным образом выпрямителей туловища) и живота (прямая мышца живота и ее синергисты). Однако биомеханика человеческого тела такова, что при глубине наклона туловища более чем на 20° от вертикали указанные скелетные мышцы перестают оказывать активную поддержку пассивным структурам позвоночника.
моделирования РП. Рассмотрим это более подробно. При относительно небольших наклонах туловища и головы значительная часть нагрузки на межпозвонковые диски и суставы компенсируется за счет увеличения активности мышц спины (главным образом выпрямителей туловища) и живота (прямая мышца живота и ее синергисты). Однако биомеханика человеческого тела такова, что при глубине наклона туловища более чем на 20° от вертикали указанные скелетные мышцы перестают оказывать активную поддержку пассивным структурам позвоночника.При этом основная часть нагрузки перераспределяется на межпозвонковые диски и суставы и их связочный аппарат, функционально не предназначенные для длительного выполнения подобной опорной функции (рис. 16). Со временем такое механическое воздействие способно вызвать синдром тканевого перенапряжения, проявляющийся в компенсаторном уплотнении, спаянности, фиброзировании хрящевых и связочных структур позвоночника. В первую очередь страдают
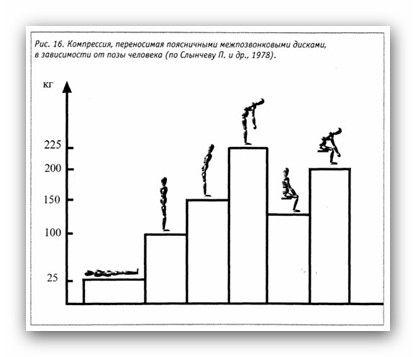 межпозвонковые диски, которые теряют свои эластические и амортизационные свойства, в них накапливаются микроповреждения, создаются условия для деформации и последующего нарушения их целостности (Аруин А. С, Зациорский В. М., 1989; Епифанов В. А., 2004; Жандрие М., 2002; Мойкин Ю. В. и др., 1987; Шеррер Ж., 1973; Яровой В. К., 2005). При этом нужно учитывать, что «выключение» мышц спины и живота из процесса стабилизации позы касается только поддержки ими позвоночника и не приводит к снижению нагрузки на сами мышцы. Наоборот, при наклонах туловища, превышающих 15-20°, нагрузка на мышечный аппарат резко возрастает (Мойкин Ю. В. и др., 1987; Шеррер Ж., 1973; Юшкова О. И., 1977). Этот факт был подтвержден и нашими собственными исследованиями (рис. 17).
межпозвонковые диски, которые теряют свои эластические и амортизационные свойства, в них накапливаются микроповреждения, создаются условия для деформации и последующего нарушения их целостности (Аруин А. С, Зациорский В. М., 1989; Епифанов В. А., 2004; Жандрие М., 2002; Мойкин Ю. В. и др., 1987; Шеррер Ж., 1973; Яровой В. К., 2005). При этом нужно учитывать, что «выключение» мышц спины и живота из процесса стабилизации позы касается только поддержки ими позвоночника и не приводит к снижению нагрузки на сами мышцы. Наоборот, при наклонах туловища, превышающих 15-20°, нагрузка на мышечный аппарат резко возрастает (Мойкин Ю. В. и др., 1987; Шеррер Ж., 1973; Юшкова О. И., 1977). Этот факт был подтвержден и нашими собственными исследованиями (рис. 17). 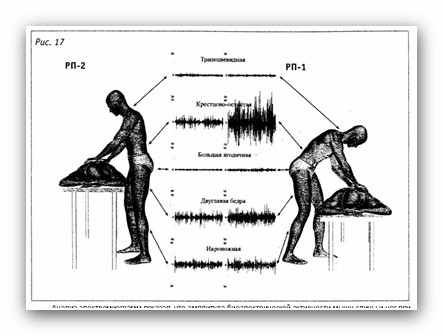
Во-вторых, фотогониометрические измерения выявили, что при выполнении различных видов разминания в РП-4 кисть по отношению к предплечью находилась в нейтральном или даже слегка согнутом на 5-10° положении (рис. 14), что ухудшало подвижность сочленений пальцев и силовые показатели дистальных мышц. Анализ электромиограмм показал, что амплитуда биоэлектрической активности мышц спины и ног при РП-4 уже изначально выше, чем в РП-2 и РП-3 (крестцово-остистой - в 4-4,5 раза, большой ягодичной - в 1,5 раза, двуглавой бедра - в 2-2,5 раза, икроножной - в 1,2 раза), а ее динамика характерна для электромиографической картины выраженного глубокого утомления при статических усилиях. Продолжавшееся в течение первых 30 минут массирования непрерывное нарастание амплитуды биоэлектрической активности крестцово-остистой мышцы (фаза компенсированного утомления) затем сменилось ее резким снижением в последней трети сеанса (фаза декомпенсированного утомления). Параллельно с этим происходило увеличение активности большой ягодичной мышцы и двуглавой бедра, первоначально выполнявших вспомогательную роль при удержании наклонного положения туловища и постепенно принявших на себя основную нагрузку.
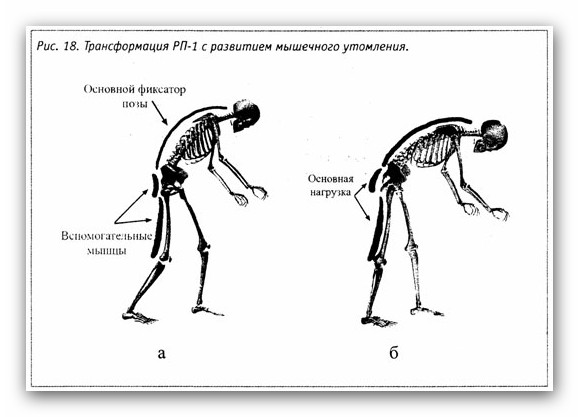 Визуально данный процесс проявлялся как трансформация позы. В начале несмотря на глубокий наклон контур спины был довольно ровным, а ноги слегка согнуты в коленях и тазобедренных суставах (рис. 18-а). С развитием мышечного утомления, то есть по мере снижения активности крестцово-остистой мышцы, контур спины становился все более округлым, а ноги практически полностью выпрямлялись (рис. 18-6). Кроме того, по мере нарастания утомления мышц спины и ног
Визуально данный процесс проявлялся как трансформация позы. В начале несмотря на глубокий наклон контур спины был довольно ровным, а ноги слегка согнуты в коленях и тазобедренных суставах (рис. 18-а). С развитием мышечного утомления, то есть по мере снижения активности крестцово-остистой мышцы, контур спины становился все более округлым, а ноги практически полностью выпрямлялись (рис. 18-6). Кроме того, по мере нарастания утомления мышц спины и ног 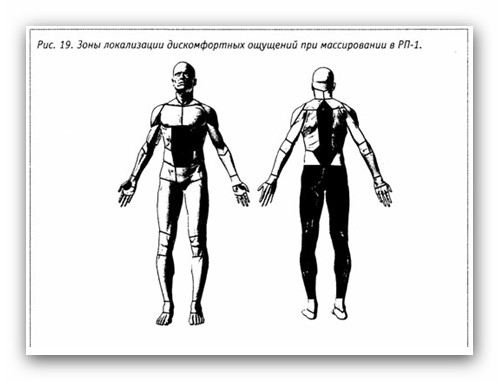 исследуемые нередко стабилизировали равновесие своего тела за счет опоры на одну из рук или колено.
исследуемые нередко стабилизировали равновесие своего тела за счет опоры на одну из рук или колено.Значительное напряжение мышц, ответственных за поддержание РП, субъективно оценивалось испытуемыми как чувство значительной усталости, онемения, ломоты, жжения и боли в области поясницы, ягодиц и бедер (рис. 19). Повышенная мышечная активность вынуждала сердечно-сосудистую систему функционировать более напряженно, чем в РП-2 и РП-3. ЧСС уже на 1-й минуте массирования была 156 ± 4 уд/мин (+58,9%), а к 30-45-й минуте возрастала до 168 ± 4 уд/мин (+76,5%).
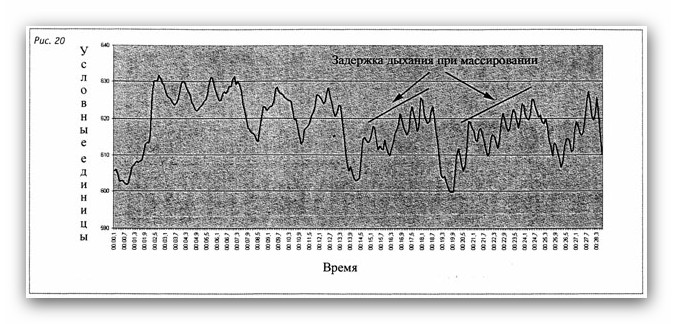
Согнутое положение туловища затрудняло деятельность аппарата внешнего дыхания. Пневмограмма показала, что дыхание испытуемых в РП-1 было не только поверхностным и учащенным (глубина дыхания - меньше на 52%, частота дыхания - выше на 42% от аналогичных показателей при РП-2 и РП-3), но и неритмичным, с задержками по 4-8 секунд (рис. 20) .
Однако в отличие от РП-4 основную роль в затруднении деятельности аппарата внешнего дыхания играло не вынужденное положение рук, а чрезмерное сгибание туловища, которое приводило к ограничению подвижности ребер и механическому
 давлению на диафрагму органов брюшной полости. Таким образом, на основании данных, полученных в результате исследования, можно рекомендовать такую методику определения оптимальной ВМС для выполнения русского массажа:
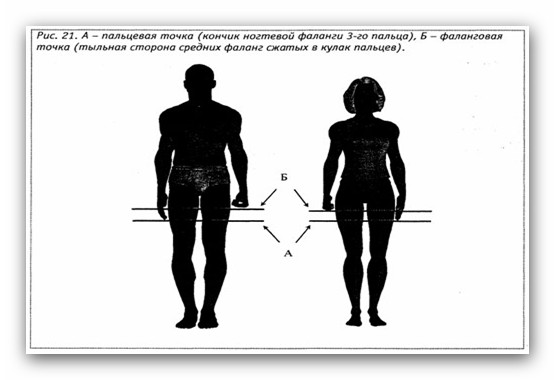
давлению на диафрагму органов брюшной полости. Таким образом, на основании данных, полученных в результате исследования, можно рекомендовать такую методику определения оптимальной ВМС для выполнения русского массажа:• специалисту необходимо вплотную стать к краю стола • ступни и колени полностью выпрямленных ног должны касаться друг друга • туловище надо держать прямо • руки свободно опущены вниз ВМС находится в оптимальных пределах (рис. 21), если его поверхность располагается в диапазоне, ограниченном антропометрическими точками (ориентирами): • снизу - пальцевая точка (кончик ногтевой фаланги 3-го пальца) • сверху - фаланговая точка (тыльная сторона средних фаланг сжатых в кулак пальцев)
Для более точной регулировки ВМС надо руководствоваться такими критериями.
• При выполнении приемов с большой интенсивностью (глубиной) воздействия на ткани целесообразно отрегулировать ВМС на уровне пальцевой точки. Поверхность массируемого участка будет располагаться несколько ниже общего центра тяжести тела массажиста, что даст возможность повысить интенсивность воздействия не только путем увеличения мышечных усилий, но и за счет эффективного использования его веса. Важно, что при этом специалист не теряет равновесия (не падает на пациента) и может достаточно точно контролировать прилагаемые усилия и интенсивность воздействия.
• Если не предполагается выполнения приемов с большой силой и интенсивностью (некоторые частные методики массажа при заболеваниях, массаж, проводимый ребенку), целесообразнее выбрать ВМС на уровне фаланговой точки, чтобы наклон туловища был минимальным.